В данной статье речь пойдет о расчете активного и индуктивного сопротивления асинхронного двигателя до 1000 В используемые при расчете тока КЗ.
1. Начальное действующее значение периодической составляющей тока КЗ от местных асинхронных электродвигателей определяется по выражению [Л1, с.141]:

где:
- Е”0М = 0,9*Uном. – сверхпереходное ЭДС асинхронных двигателей;
- х”м и rм – соответственно индуктивное и активное сопротивления электродвигателя, мОм;
- хвш, rвш – соответственно внешнее индуктивное и активное сопротивления, которыми электродвигатель связан с точкой КЗ (хвш = хс + хтр + хкл.; rвш = rс + rтр. + rкл.);
- хс, rс – — соответственно индуктивное и активное сопротивления системы, мОм;
- xтр., rтр. — соответственно индуктивное и активное сопротивления понижающего трансформатора, мОм;
- xкл., rкл – соответственно индуктивное и активное сопротивления кабельной линии, мОм;
2. Активное сопротивление rм асинхронного двигателя в момент КЗ принимается равным сумме сопротивления постоянному току статора (r1) и приведенного сопротивления роторных цепей при скольжении s = 1, мОм:
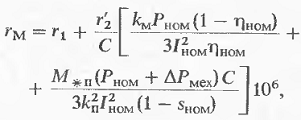
где:
- С = 1,04 – коэффициент;
- kм – отношение потерь мощности в электродвигателе при номинальном токе Iном, кА (обычно kм=0,3 – 0,35);
- Pном. – номинальная мощность электродвигателя, кВт;
- ƞном. – номинальное значение КПД, отн.ед.;
- М*п – кратность пускового момента, отн.ед.;
- ∆Рмех. – механические потери электродвигателя, кВт (∆Рмех.=0,01*Рном.);
- kп – кратность пускового тока;
- sном. – номинальное скольжение.
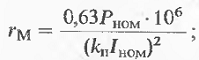
3. В случае когда отсутствуют каталожные данные, активное сопротивление АД можно определить по формуле, мОм:
4. Сверхпереходное индуктивное сопротивление х”м асинхронного двигателя определяется по формуле, мОм:
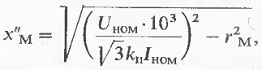
где: Uном. – номинальное напряжение электродвигателя, В;
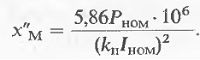
5. При отсутствии каталожных данных допускается определять х”м по формуле, мОм:
Литература:
1. Справочник по проектированию электроснабжению, Ю.Г. Барыбина 1990 г.
Источник: https://raschet.info